Jetbot Docker 실행 오류
Jetbot 이미지를 이용하여 도커를 실행하고자 하였으나 실행이 되지 않았다.
https://developer.nvidia.com/blog/training-your-jetbot-in-isaac-sim/
Training Your JetBot in NVIDIA Isaac Sim | NVIDIA Technical Blog
How to train the JetBot in Isaac Sim with reinforcement learning and test this trained RL model on NVIDIA Jetson Nano.
developer.nvidia.com
따라서 구글링을 통해 아래와 같은 글을 찾게 되었고, 댓글 작성자의 말을 따라서 진행을 시도했다.
그 결과 "docker: invaild reference format" 오류는 사라져서 진행이 되는 듯 했지만 용량 부족으로 실행이 되지 않았다.
https://github.com/NVIDIA-AI-IOT/jetbot/issues/406
different images are not found / building of containers not possible · Issue #406 · NVIDIA-AI-IOT/jetbot
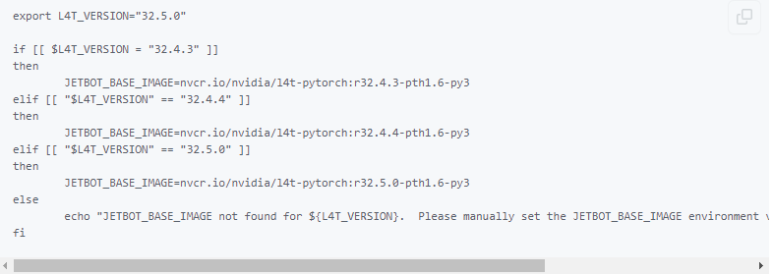
When following the steps from the documentation, the following errors occur: jonathan@jonathan-jetson:~/jetbot/docker$ ./enable.sh $HOME JETBOT_BASE_IMAGE not found for 32.5.1. Please manually set ...
github.com
문제점은 다음과 같았는데 기존 Jetbot 이미지를 사용할 경우 plain 버전의 jetpack 4.5.0을 실행 Configuration을 끝낸 후 다시 Jetbot 이미지를 덮어야 했다. 이 과정에서 Jetbot의 이미지가 32기가만 인식하게 설정되어 있었고 해당 문제를 해결하기 위해 $HOME, Jetbot의 모든 sh 파일과 마운트 파일을 점검해야했다.
해결 방법
그 결과 2가지 해결방법을 찾을 수 있었다.
첫째, usb를 마운트해서 해결하는 방법
이 방법은 실제로 usb를 꼽아보니 jetbot의 바퀴보다 usb가 더 튀어나와 가급적 사용하지 않고자 하였다.
둘째, Jetpack 4.5.1에 jetbot을 올리는 방법
기존 4.5.0에서 isaac sim 에서 공식 지원하는 4.5.1로 바꿨다. 이 후 Jetbot 이미지를 씌우지 않고 바로 진행하였다. 그런 다음와 같이 코드를 수정하였는데 이 뿐만 아니라 base/build.sh 폴더에 build.sh L4T 버전과 Jetbot 버전을 동일하게 설정해야했다. 전반적으로 블로그에 올리기에는 까다로워서 따로 내 Github에 올려놨으니 필요하신 분들은 Clone 해서 사용하면 된다
git clone https:/github.com/pnltoen/Jetpack_4.5.1-for-jetbot-Isaac_Sim-.git // 클론해서 사용가능용량 제한으로 인해 전체 파일을 올릴 수는 없었고 기존 Hailoclu님의 코드에서 도커 부분만 위 파일로 교체 시 정상 진행이 가능하다. 이 후 Jetbot이미지가 내부에 없다는 오류 메세지가 발생하지만 무시하고 진행 시 서버에서 다운을 받는다.

댓글