Unity
Unity Physics
잘못 작성되어 있는 내용이 있다면 댓글로 알려주시면 감사하겠습니다.
ref#1 Unity : Expanding the robotics toolbox: Physics changes in unity 2022.1
ref#2 Nvidia Omniverse : OmniPVD - PhysX Visual Debugger
Mecanum Wheel 실습
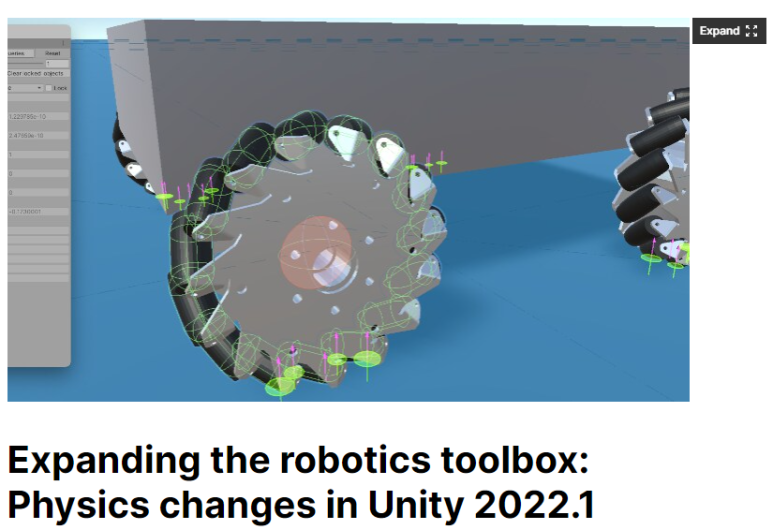
AMR에서 시뮬레이션 물리엔진을 이야기할 때 가장 많이 나오는 척도가 Mecanum Wheel입니다.
학생 때 연구실에서 3D 프린터로 Mecanum Wheel을 출력하고 데굴데굴 굴려가면서 3D Printing에서 수축의 정도 그리고 고무패킹이 없으면 어떻게 되는지 확인했었습니다.

자세히 보시면 핀 길이가 조금 길어서 니퍼로 자르고 본드로 고정하였습니다. 당연히 축은 본드로 고정이 되어 보다 헛돌게 되었습니다.
Mecanum Wheel - 사용 목적
공장과 같은 협소한 공간에서 효율적으로 움직이기 위해 전방위적으로 움직일 수 있는 AMR이 요구되게 되었고 이를 해결하기 위해 전방향 구동 가능한 메카넘 휠이 사용되게 되었습니다. 즉 자동차로 따지면 운동(진행) 방향 (회전 축 방향)을 바꾸기 위한 조향 장치가 필요하지 않습니다.
즉 기동을 위해 필요한 공간 확보가 적고, 부품 수가 줄어 이에 따라 효율적인 사용이 가능합니다.
글을 찾아보니 메카넘 구동형 전-방향 시스템 개요와 메카넘 휠의 역사 글에 내용정리가 잘 되어 있네요...!
문득 궁금해서 타이어 패턴에 관한 논문 몇개 찾아보았습니다.
Effectiveness of Tire-Thread Patterns in Reducing the Risk of Hydroplaning
wet-conditon에서 drviing 할 때 risk of hydroplaning을 줄이기 위해 Tire-Thread Patterns을 조절하는 연구에 대한 논문, 6개의 patterns을 고려하였다. 결론적으로 말하면 Water film thickness, Tire Inflation Pressure, Applied Load를 고정하고 Groove Volum, Rib Area (mm)에 변동을 줬을 때 Hydroplanning Speed (Speed가 높을 수록 안정적 덜 risky함)의 값을 시뮬레이션 한 논문이다. 그 중 Longitudinal Groove, V-20º or 40º 를 비교해 보았다. (Table 2, 3 참조) water flim의 Thcikness가 두꺼울 수록 패턴에 따른 차이가 많이 났다.(5%(V-20º)그리고 10%(V-40º) compared with Longitudinal Groove)
정성적 결론
AquaPlanning에서는 Water Flim Thickness에 따라 유의미한 차이가 나지만, 저속, 지면에서는 큰 차이가 없을 것으로 예상 (실제 판단 근거 : Water flim thickness가 작을 수록 차이가 적어지는 경향을 보임 Water Film이 없고 저속임으로 AMR에서 Tire Pattern Mesh과 Real Tire Pattern과 다른 것은 큰 차이가 되지 않을 것으로 판단. 정량적 근거는 찾을 수 없었지만 정성적으로 판단하였음. Table : 2,3 참고)

댓글