URDF Format 및 모델링 선정
로봇 시뮬레이션을 진행하기 위해서는 일반적으로 urdf 파일 형식을 사용한다. (Universal Robot Description Format) 이를 진행하기위해 솔리드웍스의 SW2URDF 애드온을 이용하여 진행하였다.
공모전에 참가하기 위한 차량의 경우 모델링을 수정할 필요가 있었고 해당 개념을 잘모르는 상황에서 복잡한 Mobile Robot을 Importing 하는 것은 문제가 있었다.
따라서 XS809 드론 모델을 인터넷에서 다운로드하였고 (https://grabcad.com/library/visuo-xs809-1) Fair Use 허락을 구하였다.
visuo xs809 | 3D CAD Model Library | GrabCAD
The CAD files and renderings posted to this website are created, uploaded and managed by third-party community members. This content and associated text is in no way sponsored by or affiliated with any company, organization, or real-world good that it may
grabcad.com
Solidworks URDF Exporter
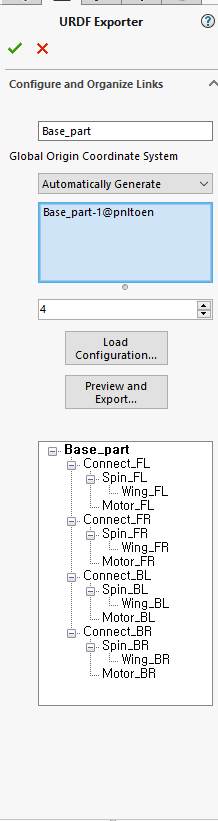
이 후 솔리드웍스를 통한 urdf를 진행하였다. 처음에는 베이스 일부분을 통일하고 나머지는 링크로 진행하였다.
2가지 문제가 발생하였다.
첫째, 시뮬레이션 진행시 조인트가 늘어나 가시화되는 현상.
둘째, 실제로 솔리드웍스에서 작성한 조인트가 작동하지 않음.
Isaac Sim Physics 검증
(메쉬의 경우 Rigidbody로 타이트하게 잡지 않았다)
또한 URDF 변환시 색상이 저장되지않아 하나하나 Omniverse View로 메테리얼을 지정해줘야 한다는 단점이 있었다. 따라서 Step 파일로 진행을 하였는데 Step 파일은 파일이 깨지면서 모든 색상이 구현되지 않았다.
(참고용 사진) 위와 같이 부분적으로 색상이 체크되지 않는 현상이 발생하였고 이에 혹시나 싶어서 솔리드웍스의 Step파일 -> 3ds Max 임포팅 -> Omniverse 3ds Max Connector -> USD 파일 변환 과정을 진행하였다.
그 결과 원활하게 작동하는 것을 확인하였다.
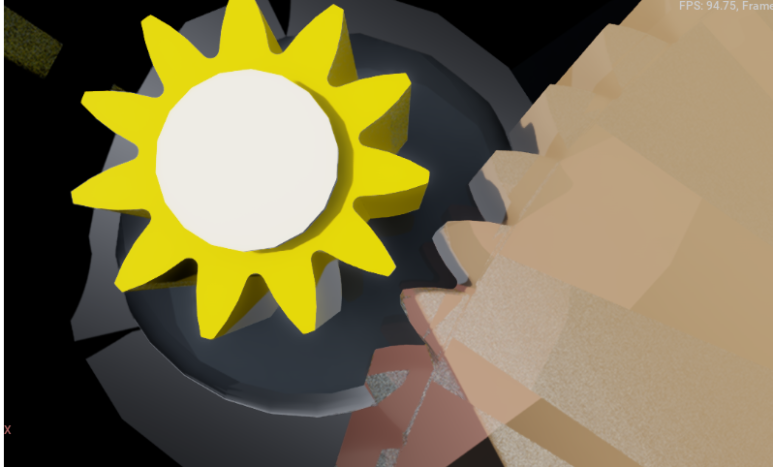
처음에는 기어, 모터, 날개를 모두 시뮬레이션 상에서 구현하고자 하였으나 연구실 컴퓨터 성능 제한으로 인하여 (RTX 2070super) 특정상황에서 프로그램이 꺼지는 상황이 발생하였다. 30FPS 붕괴. 또한 다운로드 받은 모델링이 공학적으로 설계되어있지 않음을 확인하였다.
따라서 다음과 같이 기어가 맞물리지 않았고, 시뮬레이션 실행시 모델의 메쉬가 겹쳐있어 낑기는 현상(?), 게임할 때 메쉬가 동일한 곳에있어 오브젝트가 흔들리는 현상이 발생하였다.
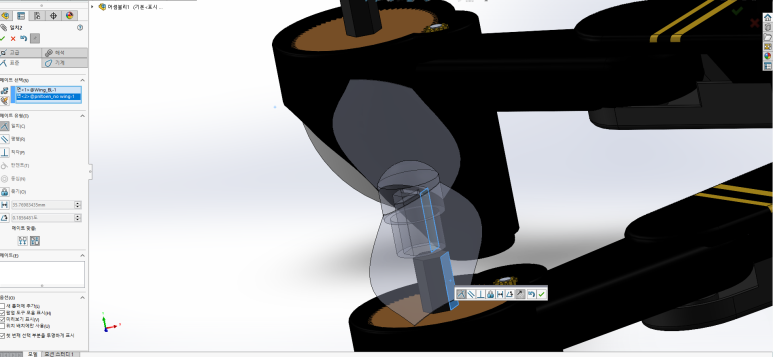
기어의 맞물림 및 모델링 검증을 시뮬레이터 프로그램을 통해 할 수 있음을 확인하였다. 결과적으로 컴퓨터 성능고려, 모델링의 비공학적 설계를 감안하여 4개의 날개를 제외한 부분은 모두 하나의 링크로 설정하였다. 이 후 시뮬레이션을 진행한 결과는 다음과 같다.
날개가 중력의 영향을 받아 정상적으로 떨어지는 것을 확인하였다.

댓글