반응형
Sim2Real Reinforcement Learning 실습
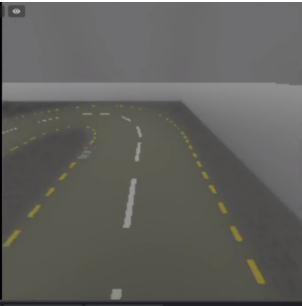

3D 프린트로 트랙을 출력한 후 도색작업을 완료하였다.
기존 Isaac Sim Reinforcement Learning에 나와있는 예시에서는 Line Tracking을 위한 노란선이 좌측처럼 이어져있지 않았지만 시뮬레이션과 다른 상황에서 어느정도의 성능을 뽑을 수 있는지, 도색의 어려움으로 트랙을 일렬로 이어서 진행하였다.
추 후 계획
공식문서의 Sample을따라 진행하였는데 포스터 물감으로 도색한 부분에서 문제가 발생하였다.
Jetbot의 경우 이동할 때 바닥면의 캐스터를 사용하는데 이 캐스터가 굳은 물감 위에서 원활하게 동작하지 않았다.
따라서 영상 중간에 로봇의 후면부를 살짝 건들였다.
따라서 원활하게 움직이는 것을 확인하는 것 보다 라인 트래킹이 잘 되는지를 확인하고자 했고 그 결과 대성공으로 시뮬레이션과 차이가 있는 환경에서도 원활하게 방향전환을 하는 것으로 확인하였다.
이 후 캐스터가 잘 작동하는 복도에서도 작동을 검사하였다.
FOV 문제인지, 학습의 주가 라인트래킹이여서 그런지 물체를 피하는 부분이 높은 성공률을 보이지는 않았고 해당 문제를 개선해볼 예정!
반응형

댓글